Starting a new path at 30
One of the most terrifying things I’ve ever done was starting a completely different career path at age 30. Coming to this degree as a mature student gives me a somewhat different background than most students. I feel this enriches who I am as a designer and what I can contribute to the design field.
Below I reflect on my road towards becoming a soft robotics designer. As such, I highlight my projects that inspired an interest in this area. I do recognise that my other projects contributed to who I am now. For example, I actively pursued a project in the Sensory Matters squad for my M1.1, outside of my comfort zone. In this project I discovered that I enjoy speculative design, but that soft robotics design and research is really the direction I want to go in. Based on this experience, I focused my remaining courses and projects towards this goal.
Note: In 2019, I started the bachelor’s in Industrial Design. After a year and a half, I was admitted into the master’s based on my excellent academic track record and the portfolio I submitted. As I never had an FBP assessment, I also include my bachelor work in this section.
Running a language institute
I obtained a BA in English Language and Literature (2010, cum laude) and MA in Literary Studies (2012, cum laude). I then went on to pursue an English language teaching career, ultimately culminating in 2018 in the foundation of our own language institute, De Taalkamer, with my business partner. For four years, I ran De Taalkamer next to being a full-time Industrial Design student.
I bring this background to my design practice in three main ways:
- I enjoy teaching and I love creating educational materials, such as my graduation project, the Soft Circuits Toolkit.
- Because of my degree in English literature, I excel at reading and communicating in English. This helps me especially as a researcher, both when analysing sources and when communicating my research in the form of presentations or papers.
- I am comfortable contacting people and pitching my designs and ideas. These skills helped me tremendously when presenting at the TU/e Contest, where we won the prototyping award and the Wildcard, and when involving physics teachers in my graduation project.

Interest in soft robotics
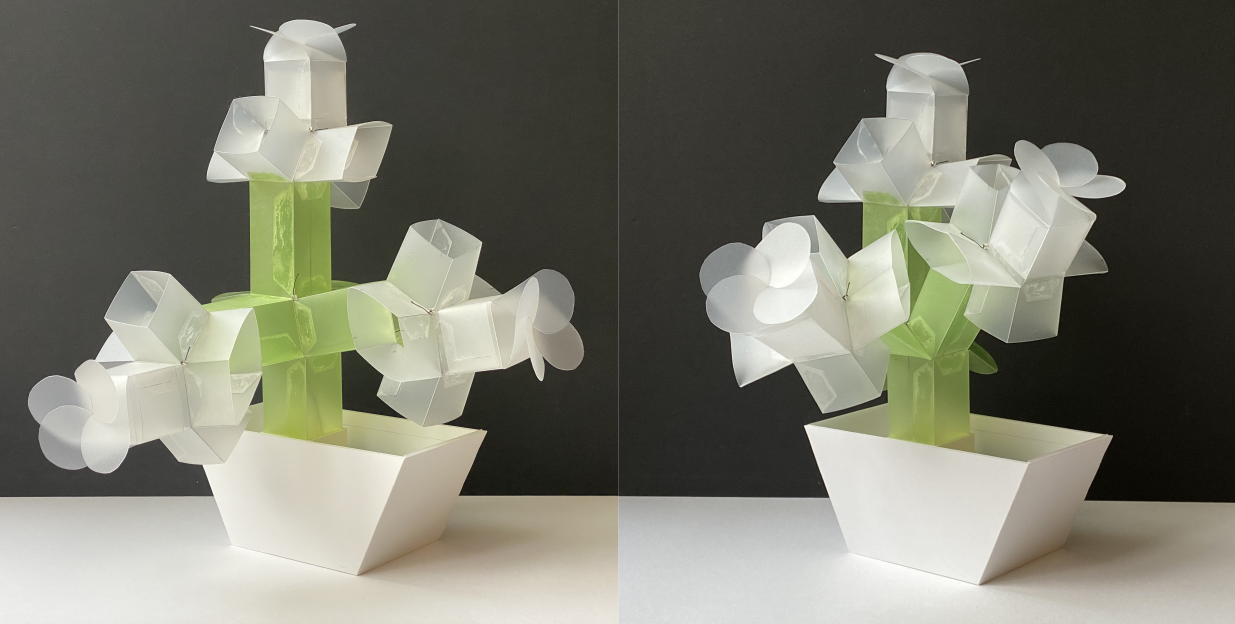
B1.2 Project 1: Fleureau was my first exposure to shape-change as a design direction, and I was fascinated. We developed a shape-changing plant to visualise well-being in office gardens. Because of the lockdown, I offered to take responsibility for the complete realisation of our prototype. In doing research for this project, I was inspired by an article on compliant mechanisms by Disney Research. This is still my favourite research article and has been a constant inspiration throughout my degree. The plant shape was based on research by Bas Overvelde (article).
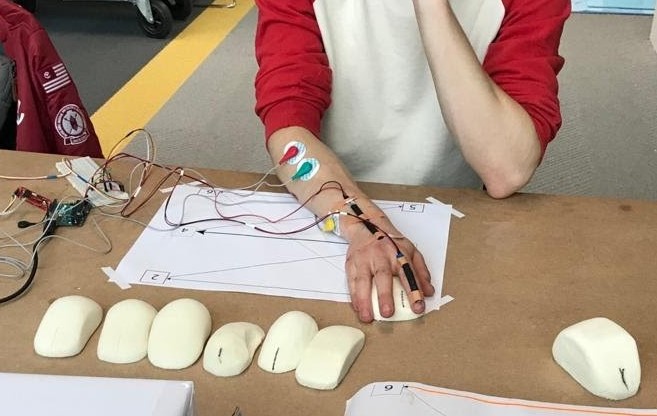
B2.1 Project 2: Mouscle is a computer mouse that slowly changes shape to prevent RSI symptoms. This group project sparked my interest in shape-changing interfaces. I found it interesting that soft devices weren’t being developed more in our design department, and from this project onwards, I implemented shape change (compliant mechanisms, soft actuators, etc.) into many of my projects. I also discovered the field of design for medical applications through this project.
MAIN TAKEAWAYS
- The road towards obtaining a patent for Mouscle involved many meetings with The Gate (the start-up platform of the TU/e) and a start-up interested in buying the patent. I learnt how to communicate the innovativeness of our idea and how to sell our idea to a potential buyer.
- At this stage in the bachelor’s, our prototyping skills were almost good enough to build a fully functioning mouse. Although this was impressive, I found it disappointing that we never got the mouse to work at such a level that we could do actual user testing with it. I think this drove me to focus on fully experiential prototypes after this project.



M1.2 Designing User Interfaces with Emerging Technologies (DUIET)
In the DUIET course, I saw an opportunity to work with pneumatics for shape change, something I had not done before and which laid the groundwork for my graduation project. Our group created a shape-changing bike handlebar interface to signal dangerous traffic situations through different ring actuation patterns.
MAIN TAKEAWAYS
- I learnt about pneumatic circuits and I corrected my misconceptions about how these circuits work.
- I had to be careful not to lead the group too much because of my clear (and ambitious) vision of what to build. I made sure to listen to other group members and be open to their feedback and ideas. This helped make this project one of my best collaborations in the entire master’s.
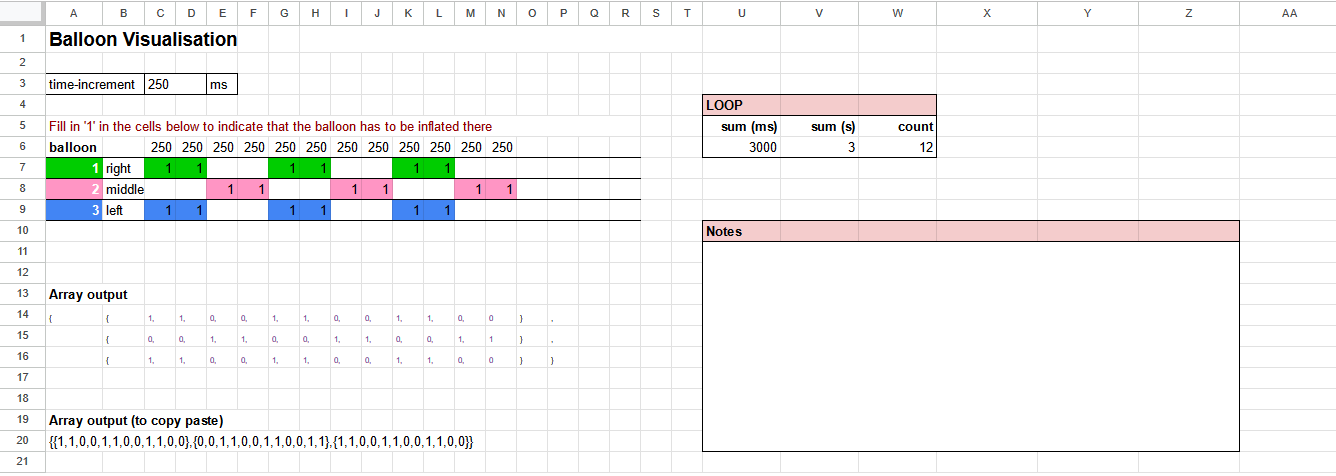
- I made an online spreadsheet tool that could visualise and generate actuation patterns. I learnt that visualisation tools can help groups work together better and that it can be fruitful to develop one for a project.
- As I value the open source movement, this project (and many of my others) was placed on my Github.


M2.1 Start of the Soft Circuits Toolkit
Obtaining an internship at the Soft Robotic Matter group at AMOLF was a dream come true for me. I enjoy the depth of knowledge the group has and being able to work with PhD’s and Postdocs, which challenges me to deliver work at a higher level than expected of me in the master’s. It was also a great way for me to find out if pursuing a PhD would fit me.
I mainly worked on understanding fluidics and learning how to analyse my designs during this semester, creating a working version of the toolkit, and validating the concept. As such, this semester was quite engineering-focused.
MAIN TAKEAWAYS
- The extra-departmental courses I took in Chemical Engineering and Mechanical Engineering helped me communicate effectively with the engineers in the group. The fundamental engineering knowledge I gained in these courses helped me absorb new information more quickly.
- My strong interest in electronics and my education background helped me make clear analogies between fluidics and electronics for teaching purposes.

Extracurricular
In my spare time, I enjoy making electrical and coding art. Some of these electronics projects I converted to soldering workshops (fully open-source on Github), which I taught at the TU/e with Rory Aartsen. Some were also taught at FabLab Amersfoort, where I am a volunteer. These projects mainly helped me solidify my electronics, programming, and teaching skills, which all contributed to my graduation project.