FMP project: Soft Circuits Toolkit
Coach: Frank Delbressine (TU/e)
External supervisor: Bas Overvelde (AMOLF)
About the project
This semester, I continued with a project for which I had already completed a first working prototype, which meant I often received the question: “So what have you added to the toolkit? It still looks the same.” This meant I really had to bring the project to the next level, which was a challenge. Based on the recommendations I had set up at the end of the M2.1 phase, I was able to quickly develop the components that the toolkit needed to enable the building of a wide variety of circuits. Feedback I received on the Midterm Demo Day helped me make the toolkit more cohesive by adding several devices (paper animals, gripper) that can be powered and controlled by the components in the toolkit. I was able to design these device because of my knowledge of compliant mechanisms (from the Creative Mechanical Engineering course). Ultimately I feel that this addition makes the toolkit more attractive and complete, as it gives users something to work towards, and inspire them to make their own soft robots.

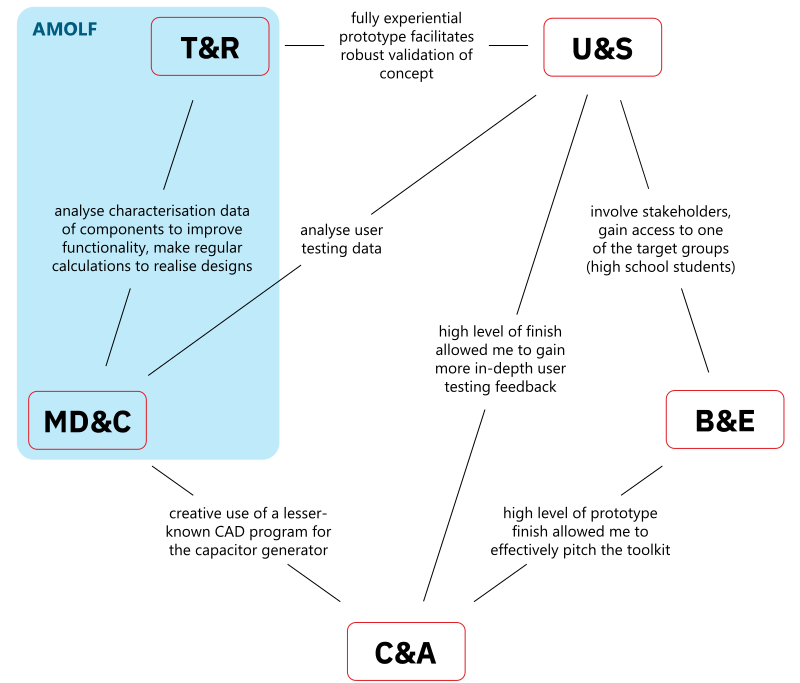
Expertise Areas in the Soft Circuits Toolkit
For me, the most difficult aspect of this project was mediating between what was expected of me by AMOLF and the Industrial Design department. At AMOLF the emphasis was placed more on doing engineering-oriented research, mainly designing and validating new fluidic components (see the blue area in the figure on the right). This meant I had to be careful to independently plan the project to fit within a design scope (by including users in the project, for example), and work on my development as a designer. Looking back, I can say that I succeeded, but in the future I will keep in mind that different institutes might have different visions and that it is my responsibility to direct my own learning.
This was the first project in which I really saw how my business skills could benefit my project. Due to my background running a language institute, I was able to bring my marketing knowledge to this project. I leveraged my pitching and presenting skills to onboard physics teachers from various schools. The high-quality photographs I took, as well as the high finish of the online platform and manual helped me convince these parties to work with me. Their involvement helped me gather valuable expert feedback and gave me user testing opportunities with high school students that I otherwise would not have had.
As a designer, I place great value on fully experiential prototypes. To achieve this, I invested a great deal of time and effort into understanding the physics behind fluidic systems to design components that actually work. I also learnt about mould design by doing research and I independently improved my CAD skills to be able to design all the components (and the required moulds). I used the programming skills that I developed as a teaching assistant for Creative Programming to do frequent data analysis on the tests I ran on the components. These skills also enabled me to develop the algorithm for the capacitor generator.
However, I wanted to go beyond what was expected of me at AMOLF in terms of component creation, also focussing on the aesthetic quality of the toolkit. I selected vibrant colours to make the toolkit look inviting. All the components also have different colours to help tell them apart. The components were all completed to a high level of finish, including the manual. This was mainly done to improve the experience of the user during user testing, so I could obtain more in-depth feedback.
Main takeaways
My main development this semester has been in terms of becoming a design researcher.
Outlook
So far, we’ve received significant interest from schools and researchers regarding commercialisation of the toolkit, which hints at the viability of this product. In the future, I want to pursue the option of bringing the Soft Circuits Toolkit to market by working with external parties because I believe that this product could be a valuable asset to schools and soft robotics labs. However, I’m not interested in creating my own startup out of the project. Instead, I’d like to pursue a PhD and do design research in the field of soft robotics. I’m currently in discussion with Bas Overvelde and Anke van Oosterhout on taking on a joint PhD position between AMOLF and Eindhoven. I’m very excited about the opportunity to bring the knowledge that I gained this semester to this position and setting up soft robotics as a design area at the TU/e.
