M1.2 – Fetal Manikin
This was an NDA project, and as such I can’t show the final design.
Coach: Frank Delbressine
Involved PhD-student: Juliette van Haren
About the project
A fetal manikin is a doll that simulates what a baby looks and behaves like. These manikins are used by medical professionals, such as doctors, to practise medical procedures. To date, it seems that movement simulation in very premature fetal manikin has not been implemented.
Within the artificial womb project, I designed an actuated limb system for a 24-week fetal manikin, which can be programmed with movements. The special thing about this limb movement system is that it’s not just actuated (the arms and legs move) but also compliant (when the limbs are pushed , they give way, just like a real baby’s). This was my first time really working with compliant mechanisms and the project solidified my interest in soft and compliant design.
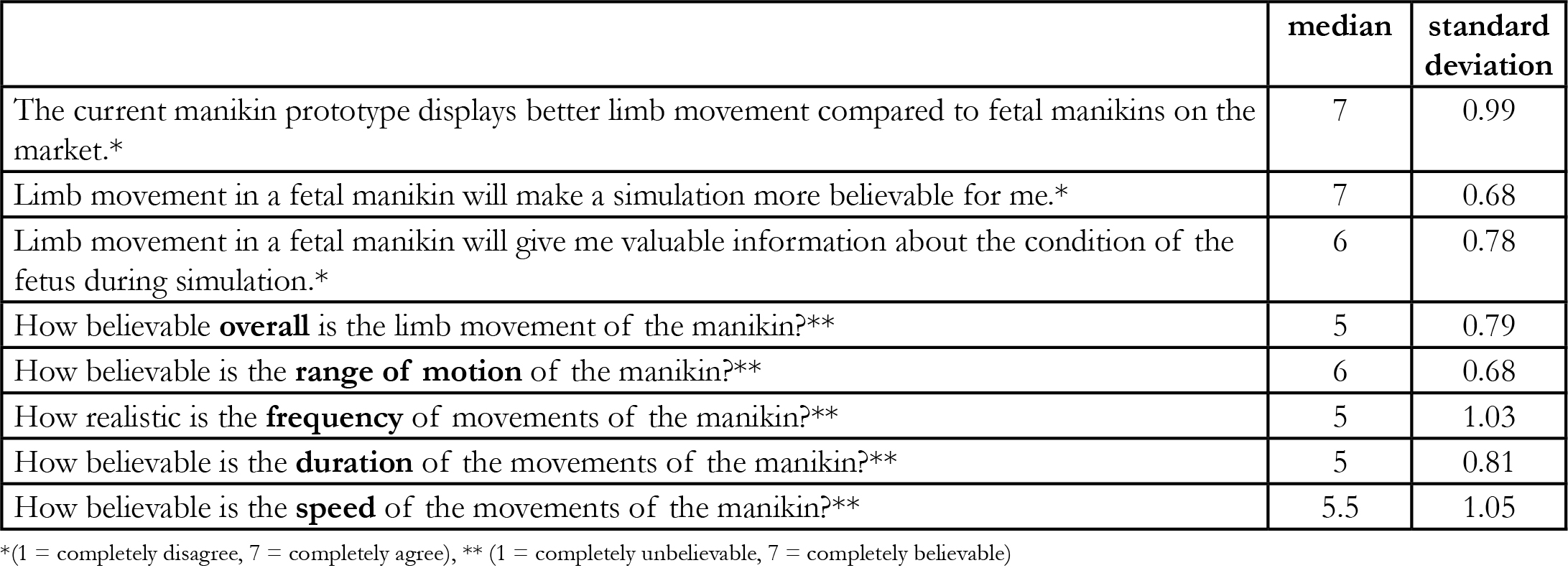
This project also gave me the opportunity to do a validation study with medical professionals at Maximá Medisch Centrum in Eindhoven.
We presented the manikin at the Dutch Design Week 2022.
Main takeaways
This project gave me a lot of self-confidence regarding my prototyping and researching skills. My main learning points were:
- How to follow a more engineering-type process
- How to do good literature research, in this case by finding out in detail how fetuses move in the womb
- How to make a good component selection (I learnt how to read the mechanical engineering literature to find actuators with the highest energy density)
- That working on both material explorations and literature research from the start can speed up my design process immensely
- That having a fully experiential prototype ready for user testing with the target group can deliver in-depth feedback that can really push the project forward (in this case towards publication)
- That the topic of a fetal manikin for simulations is a delicate subject, and that communicating to visitors at the Dutch Design Week needs empathy and tact.
Questionnaire Results
Flexure design used for the limbs

